@daner
Slabo je pominjano da ključnu ulogu u realizaciji ovih Home made navigacija ima paket RTKLib softvera.
Njegov osnovni kod koji je bio public je prvobitno razvio japanski stručnjak i programer, a najnovija unapredjenja i prilagodjavanja pogotovo bitna za Ublox prijemnike radi čovek koji je saradnik Nasa-e.
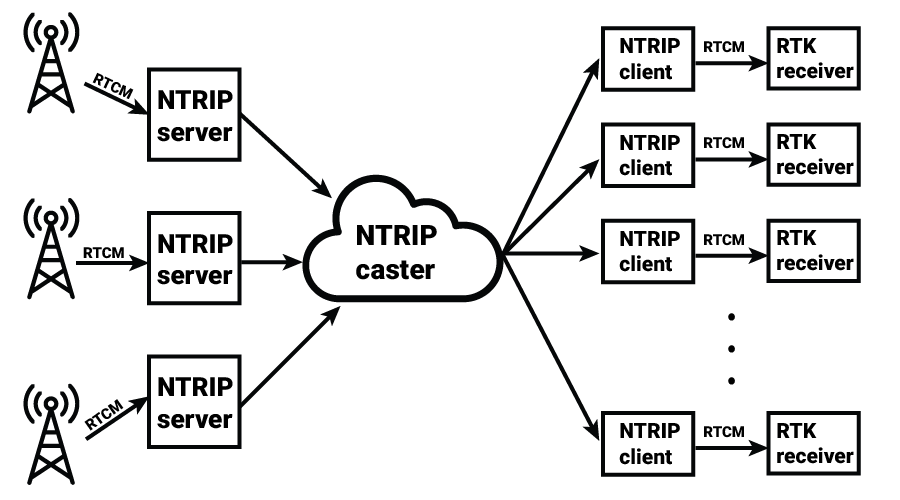
RTKNavi je deo tog paketa programa, on radi sam proračun i navigaciju u rover-u - traktoru, a STRSVR kao takodje sastavni deo služi kao server za prosledjivanje RTK korekcije sa baze.
Postoji odgovarajuća verzija za povezivanje sa dvofrekventnim prijemnicima.
Iako F9P čip ima u sebi ugradjenu mogućnost za izračunavanje odnosno dobijanje solucije, koliko znam uglavnom svi koriste varijantu sa RTKLib, pošto je stabilnija.
Iz tog razloga je za rover bespotrebno da ploča ima wifi ili bluetooth pošto da bi konekcija direktno radila sa RTKLib softverom potrebna je USB veza. Možda bi mogao da se napravi neki virtuelni port ili slično, ali je u suštini otežavajuće.
Uglavnom zato svi koriste pločice sa ardusimple sajta koji je postavio zadrugar66.
Nisam do sada vidjao F9P pločice sa integrisanim Wifi.
Verovatno da je način povezivanja sa čipom putem USB isti i da se koristi isti driver.
Ono što mi pada na pamet je da bi Wifi funkcija mogla da se iskoristi tako da pločica potpuno samostalno radi kao bazna stanica.
E sad, pitanje je da li njene softverske mogućnosti to dozvoljavaju pošto je nepoznanica, odnosno nisam pročitao da je neko ovu varijantu koristio u tu svrhu.
Obično se podigne server na stonom računaru povezanim sa modulom, ili za to služi kombinacija sa Arduinom ili Rapsbery Pi.